



In later posts, I want to critique Joy Christian's claim that his counter-example to Bell'sTheorem is “real” (maybe it is, but I suspect not, and will work that out later), but first we have to understand the math he is using. That math is closely related to Quaternions which Doug Sweetser has been busy familiarizing Science 2.0 readers with. So, I will start in the Quaternion “looking glass” and find a way out to the Clifford Algebra CL(3,0) used by Joy Christian in his counter-example to Bell's Theorem.
In my later post where I critique his counter-example, I won't be following step-by-step through his calculations looking for a mistake because we can safely assume he knows the math better than I do. Instead, I want to be able to clearly picture what his math represents. We should be able to picture what the math is doing because the CL(3,0) that he's using is just a way of algebraically encoding the full geometry of ordinary3-D space. From now on I'll refer to the math he's using as Geometric Algebra (of 3-D Euclidean space = G3). Before understanding the “geometry”, let's find the algebraic relationship between the vectors used in Geometric Algebra and Quaternions.
Algebra: Finding Vectors in Quaternions
What is the relationship between the basis elements of Quaternion vectors, i j k, and the Cartesian basis elements of 3-D Euclidean vectors, e1e2 e3? They aren't exactly the same because the square of a Quaternion basis element is -1 and the square of a Euclidean basis element is +1.
The simplest relationship I can think of to try is i=μe1, j=μe2, and k=μe3 assuming also that μ commutes with e1e2e3. To make any sense of this, we have to expand our concept of Euclidean vectors to include Quaternion multiplication. In particular, we need to realize that
i j k anti-commute implies e1e2e3 anti-commute. So, e1e2=-e2e1 etc.
We have to satisfy the defining equation of the Quaternions:
i2=j2=k2=ijk=-1.
Remembering that the Euclidean basis vectors square to 1 and that I've assumed μ commutes with them, we easily translate the Quaternion equation to Euclidean basis vectors:
μ2=μ3e1e2e3=-1
Substituting μ2=-1 into μ3e1e2e3=-1, we get μe1e2e3=1. Can we solve this last equation for μ? Yes.
Start with
μe1e2e3=1
and multiply both sides by e1e2e3, to get
μe1e2e3e1e2e3=e1e2e3.
To simplify the left hand side
μe1e2e3e1e2e3
anti-commutee1forward to meet itself in the middle, squaring to 1. Then do the samefor the other two.
-μe2e1e3e1e2e3
μe2e3e1e1e2e3
μe2e3e2e3
-μe3e2e2e3
-μe3e3
-μ
What is -μ again? Oh yeah, it's the left hand side of the equation that had e1e2e3 on the right side.
So, μ=-e1e2e3. The reader can easily verify it commutes with all the basis vectors (μe1=e1μ) and squares to -1.
Obviously, the starting point that μ2=-1 means that μ is also equal to plus or minus the square-root of minus one. Normally the letter i is used to denote square-root of minus one, but that looks too much like the Quaternion basis element i. So, we'll use I instead, not to be confused with the identity element which is just the number 1. We're not doing matrix algebra! Geometric Algebra is alot easier than that.
Now we can write μ=±I (because μ2=-1 and I=i=√-1). If we then define I≡e1e2e3,then we conclude μ=-I. This I is sometimes used in Geometric Algebra in exactly the same way the ordinary imaginary number i is used in complex numbers, but it's not the only I that plays that part. Geometric Algebra has more than one object that can be used as the imaginary part of a complex number; some commute, like this I does, but others anti-commute. In terms of it's acting like i, I is referred to as a pseudo-scalar. I is also a volume (three lengths multiplied together) but it also keeps a sense of direction by the handedness of the vectors. I is right-handed, and is referred to as a directed unit volume. Finally, it's the product of three vectors, so I is also a trivector.
We did all this to come up with i=-Ie1, j=-Ie2, k=-Ie3. Is this satisfactory? Not really.
The looking glass
Now i j k form a left-handed basis because they flip all three of our right-handed directions. To see that flipping all 3 Cartesian directions is the same as flipping just one of them, imagine your hands are guns with index forward and thumb up on both hands. Now bend your middle fingers straight out so they point to each other. Now rotate the left hand tilting the thumb backward until it's pointing down, keepingyour middle fingers pointing at each other. You should have thumbs, index fingers, and middle fingers all opposite each other. In otherwords, flipping all three is the same as flipping one axis and then rotating by 180 about that axis. So, what happens if we reflect the Quaternions through the e1e3 plane, changing the sign on e2 alone?
Changing to a left-handed system by going from e1e2e3 to e1(-e2)e3 remembering to flip the e2 in I too
i=-Ie1→-e1(-e2)e3e1=(e1e2e3)e1=Ie1
j=-Ie2→-e1(-e2)e3(-e2)=(e1e2e3)(-e2)=I(-e2)
k=-Ie3→-e1(-e2)e3e3=(e1e2e3)e3=Ie3
So, i=Ie1j=I(-e2) k=Ie3
and we see i j k line up perfectly with a left-handed coordinate system meaning that the Quaternions were definitely a left-handed system. Not only that, but since they didn't transform the way a vector would (because they went from being opposite the vectors to lining up with them) in going from right-handed to left-handed, Quaternions are pseudo-vectors. (They are also bivectors because i=Ie1=(e1e2e3)e1=e2e3 where I've flipped the sign twice to get the e1's together. The term bivector is obvious because it's two vectors multiplied together.) I chose to keep the minus sign on the y-direction to emphasize this is a change of coordinate system from left-handed to right-handed. In fact, throughout this post, I've relied heavily on using coordinate basis vectors because that's what the structure of Quaternion's forced on me. But in Geometric Algebra, coordinates are not emphasized because most problems can be solved more easily without even choosing basis vectors. How do we indicate a change from left-handed to right-handed without referring to the coordinates?
Remember when first introducing I≡e1e2e3 I pointed out it was right-handed? Notice, however, that the product of our left-handed basis is e1(-e2)e3=-I which can obviously be re-written as e1é2e3=-I (whereé2≡-e2). So the real way the math shows we're dealing with a left-handed coordinate system is that the product of the basis vectors is of the opposite sign as the right-handed volume element. That means we are free to ignore the basis vectors, and then just use -I (the left-handed unit volume element) instead of I in our equations to indicate we're using a left-handed system. If we had known that from the beginning, we could have gone straight from the right-handed basis i=-Ie1 to the left i=-(-I)e1=Ie1 without fuss.
But, wait a minute. If I is right-handed, shouldn't I define a left-handed pseudo-scalar and use that in my left-handed system? Then the Quaternions would be pointing opposite the basis vectors again (relative to the left-handed pseudo-scalar) and I would be right back where I started. This problem of which pseudo-scalar to use when switching to a left-handed system is analogous to the difference between representing a change from left-handed to right-handed by using your left-hand when applying the cross-product VS staying with your right-hand for the cross-product while looking in a mirror.
It's worth elaborating on handedness because Joy Christian's counter-example is in fact taking the unknown handedness of a random unit volume element μ=±I as something that can be measured in a spin-analyzer. So, I want to be sure we are clear on how reversing handedness works. The Wikipedia article on pseudo-vectors has a couple of useful pictures that I was at first confused about. It was only by clearing up my confusion over these pictures that I was able to get the right result in this post when reversing the handedness for the Quaternions.
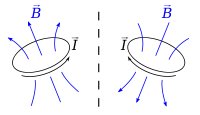
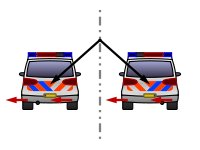 In both these pictures we are looking edge-on to a mirror placed vertically down the middle so that we can't actually see the mirror. Then we are imagining one side shows the real object and the other side shows the mirror image (as if we would be able to see the reflection even though we can't see the mirror). Notice that the magnetic field B flipped when reflected, in obvious conflict with what a real vector would do, and the angular momentum of the van wheels driving away from us stayed in the same direction when reflected, also in obvious conflict with what a real vector would do. But wait a minute (the confused me said to myself), shouldn't I use the left-hand rule when looking at the mirror image? (For those that don't know, the right-hand rule is very easy to apply to anything rotating: just curl your fingers in the direction of rotation and stick your thumb straight out. Your thumb points in the direction of the pseudo-vector.)
In both these pictures we are looking edge-on to a mirror placed vertically down the middle so that we can't actually see the mirror. Then we are imagining one side shows the real object and the other side shows the mirror image (as if we would be able to see the reflection even though we can't see the mirror). Notice that the magnetic field B flipped when reflected, in obvious conflict with what a real vector would do, and the angular momentum of the van wheels driving away from us stayed in the same direction when reflected, also in obvious conflict with what a real vector would do. But wait a minute (the confused me said to myself), shouldn't I use the left-hand rule when looking at the mirror image? (For those that don't know, the right-hand rule is very easy to apply to anything rotating: just curl your fingers in the direction of rotation and stick your thumb straight out. Your thumb points in the direction of the pseudo-vector.) If you switch to your left hand for the mirror image, the magnetic field and the angular momentum behave just like ordinary vectors.
If you switch to your left hand for the mirror image, the magnetic field and the angular momentum behave just like ordinary vectors.
So, what's wrong with the idea that I should use my left hand when looking at the reflection? I tried thinking about how if I switch to my left hand then the mirror image of me is still using his right hand but I wanted him to use his left hand because he's in the left-handed land of the mirror, but that just left me a little bewildered. For me, a better way to think about this is to go back to what we really do when reversing the handedness of our coordinate system.
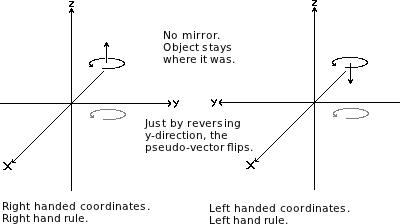
If we have graphed something spinning using the standard right-handed coordinates, then to change that graph to a left-handed one, no need to redraw the spinning thing, just erase the arrow pointing right on the y-axis and draw a new arrow pointing left on the left side of the y-axis. That's it! Now in the left-handed coordinates though, we have to use the left-hand rule to determine the direction of angular momentum for the spinning object. Re-labeling the y-axis flips angular momentum direction even though we didn't do anything to the spinning object.
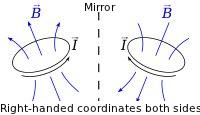 Now if we want to see what happens when switching to a left-handed system without actually referring to a new coordinate system, we can just use a mirror and keep using the right-handed rules. The mirror provides a way to talk about reversing handedness without worrying about coordinates. Using the right-hand rule for both the original object and it's reflection, we get the same result as when we just relabeled the y-axis. The pseudo-vector flips for no physical reason.
Now if we want to see what happens when switching to a left-handed system without actually referring to a new coordinate system, we can just use a mirror and keep using the right-handed rules. The mirror provides a way to talk about reversing handedness without worrying about coordinates. Using the right-hand rule for both the original object and it's reflection, we get the same result as when we just relabeled the y-axis. The pseudo-vector flips for no physical reason.
Basically, in both ways of looking at reversing handedness, we have to keep oriented by reference to the original handedness. Right-handed coordinates are used by convention just as number-lines increase off to the right by convention. In order to indicate we're not using that convention, we either have to draw the left-handed coordinate system or put a minus sign on the right-hand system. It's mathematically simpler to just use the minus sign so calculations can be done without changing any rules. The mirror is like the minus sign, allowing us to keep using our right hand in picturing what happens. Therefore, we always use the right-handed I and just put a minus sign on it to indicate we're using left-handed coordinates.
Geometric Algebra
Quaternions aren't used directly in Geometric Algebra since they emphasize coordinates and are left-handed. Now that we've found Alice in the Quaternion looking glass, time to remove the mirror and just talk about Geometric Algebra.
Notice that when you multiply a trivector and a vector, as for example Ie1=(e1e2e3)e1=e2e3, you don't get a quadvector or something. Instead, you get another bivector (plus a scalar in general). For the same reason, multiplying two bivectors just returns another bivector plus a scalar. That's why the Quaternions could be used as an algebra all on their own – the system is closed with no need for vectors and the pseudo-scalar trivector.
Linear combinations of bivectors and scalars just gives us more of the same, so if we are to get anything new out of introducing I (beyond the very important realization that the Quaternions were left-handed pseudo-vectors), we'll need to add it and the vectors separately to the bivectors and scalars. This new thing we get from adding everything together is a Multivector. Using the letter M to stand for Multivector, lower case Greek letters (α,β...) for scalars, and bold lower case letters for vectors, a Multivector can be written
M= α+ a+ Ib+ βI
The “grade” of α is 0, the grade of a is 1, the grade of Ib is 2, and the grade of βI is 3. They are linearly independent, but get mixed up in multiplication.
How many basis elements do we need to describe M?
1 is the identity and base element of the scalars
e1, e2, and e3 are the (right-handed) orthonormal vectors used as a basis for vectors
e1e2=Ie3, e2e3=Ie1, and e3e1=Ie2 are the orthonormal bivectors (that square to -1, so sometimes used as i but they don't commute) used as a basis for bivectors
I≡e1e2e3 (and I=i=√-1) is the unit trivector (squares to -1 and does commute) that is right-handed and known as a “directed unit volume” or “pseudo-scalar” and is the only base element needed for trivectors in 3 dimensional space
So, the complete algebra of 3-D Euclidean space is eight dimensional. (If you count up the basis elements, there are eight of them.)
Products:Geometric = Inner(Dot) + Outer(iCross)
What exactly are we doing when we multiply two vectors together? Kind of looks like a cross product, but what's the exact relationship? What about the scalar that comes up in a full product of two vectors or two bivectors that aren't orthogonal like the basis vectors? Time for some proper definitions. Might as well just copy and paste definitions and results starting from page 9 of David Hestene's Reformingthe Mathematical Language of Physics (aka Geometric Algebra 1).
The Geometric Product
I take the standard concept of a real vector space for granted and define the
geometric product ab for vectors a,b,c by the following rules:
(ab)c= a(bc), associative (1)
a(b+ c)= ab+ ac, left distributive (2)
(b+ c)a= ba+ ca, right distributive (3)
a2= |a|2. contraction (4)
where| a| is a positive scalar called the magnitude of a, and | a| =0 implies
that a= 0.
From the geometric product ab we can define two new products, a symmetric
inner product
a·b = ½(ab + ba ) = b·a, (5)
and an antisymmetric outer product
a∧b= ½(ab− ba) = −b∧a. (6)
Therefore,the geometric product has the canonical decomposition
ab = a·b + a∧b. (7)
From the contraction rule (4) it is easy to prove that a·b is scalar-valued, so
it can be identified with the standard Euclidean inner product. The formal
legitimacy and geometric import of adding scalars to bivectors as well as to
vectors is discussed in Section VIA.
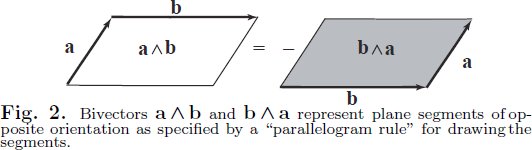
The geometric significance of the outer product a∧b should also be familiar
from the standard vector cross product aхb. The quantity a∧b is called a
bivector, and it can be interpreted geometrically as an oriented plane segment, as
shown in Fig. 2. It differs from aхb in being intrinsic to the plane containing
a and b, independent of the dimension of any vector space in which the plane
lies.
Skipping ahead to page 15 in Section VIA, where i is the same as our I =e1e2e3:
...every bivector B in G3 is the dual of a vector b as expressed by
B = ib = bi. (27)Thus, the geometric duality operation is simply expressed as multiplication by
the pseudoscalar i . This enables us to write the outer product defined by (6) in
the form
a∧b = iaхb. (28)
Thus, the conventional vector cross product aхb is implicitly defined as the
dual of the outer product. Consequently, the fundamental decomposition of the
geometric product (7) can be put in the form
ab = a·b + iaхb. (29)
The elements in any geometric algebra are called multivectors. The special
properties of i enable us to write any multivector M in G3 in the expanded form
M = α + a + ib + iβ, (30)
where α and β are scalars and a and b are vectors. The main value of this form
is that it reduces multiplication of multivectors in G3 to multiplication of vectors
given by (29). Note that the four terms in (30) are linearly independent, so
scalar, vector, bivector and pseudoscalar parts combine separately under multivector
addition, though they are mixed by multiplication. Thus, the Geometric
Algebra G3 is a linear space of dimension 1 + 3 + 3 + 1 = 23= 8.
The expansion (30) has the formal algebraic structure of a “complexscalar”
α + iβ added to a “complex vector” a + ib, but any physical interpretation
attributed to this structure hinges on the geometric meaning of i. The most
important example is the expression of the electromagnetic field F in terms of
an electric vector field E and a magnetic vector field B:
F = E + iB.
I encourage the interested reader to continue with the following papers from Overview of Geometric Algebra in Physics:
Reforming the Mathematical Language of Physics (aka Geometric Algebra 1).
Spacetime Physics with Geometric Algebra (aka Geometric Algebra 2)
Gauge Theory Gravity with Geometric Calculus
and a lot more – I recommend
Hunting for Snarks in Quantum Mechanics
I've only scratched the surface of Geometric Algebra here (and since I've only recently started learning it, couldn't do more if I wanted to). Since not many people use Quaternions and they just complicate the introduction of Geometric Algebra, it's understandable that the sources I've found don't bother to go into so much detail about the relationship between the two. But developing a concept of bivectors in the form of a∧b after just a few lines of abstract definitions, and then saying they are Quaternions, leaves any Alice in the looking glass more than a little bewildered. My motivation was just to understand the exact relationship between Quaternions and bivectors. I probably would've stopped once I got as far as μ=-I, but then I started reading Handouts, Part 1 from Physical Applications of Geometric Algebra and found they do briefly comment that the Quaternions are left-handed. Working out the details of them being left-handed has been very beneficial for me. For the first time, I understand pseudo-vectors. Also, quite unexpectedly, the study of this relationship between bivectors and Quaternions turned out not to be a side trip to understanding Joy Christian's counter-example, but actually a fairly direct route to many of the concepts needed. I feel comfortable enough with the mathematical concepts now to move ahead with my planned critique of Joy Christian's counter-example to Bell's Theorem in my next post.



Comments