


No more uncontrolled stumbling – the young animal can now keep up with the adults.
Researchers at the Max Planck Institute for Intelligent Systems (MPI-IS) in Stuttgart wanted to figure out how animals learn to walk and learn from stumbling. So they built a four-legged, dog-sized robot, that helped them figure out the details. And then a learning algorithm to optimize the virtual spinal cord
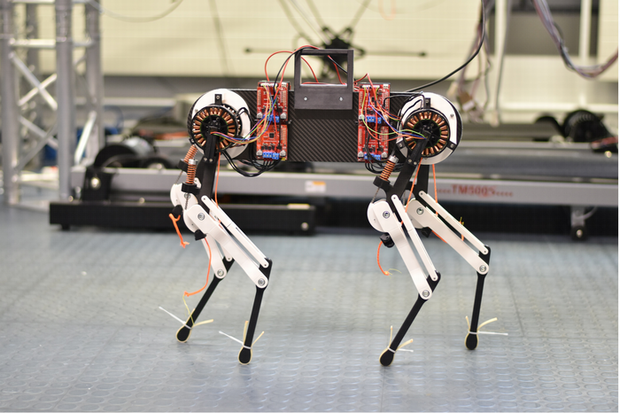
Credit: Felix Ruppert, Dynamic Locomotion Group at MPI-IS
The dog, named Morti, used a Bayesian optimization algorithm to guide the learning: the measured foot sensor information is matched with target data from the modeled virtual spinal cord running as a program in the robot’s computer. The robot learned to walk by continuously comparing sent and expected sensor information, running reflex loops, and adapting its motor control patterns.
The learning algorithm adapts control parameters of a Central Pattern Generator (CPG). In humans and animals, these central pattern generators are networks of neurons in the spinal cord that produce periodic muscle contractions without input from the brain. Central pattern generator networks aid the generation of rhythmic tasks such as walking, blinking or digestion. Furthermore, reflexes are involuntary motor control actions triggered by hard-coded neural pathways that connect sensors in the leg with the spinal cord.
As long as the young animal walks over a perfectly flat surface, CPGs can be sufficient to control the movement signals from the spinal cord. A small bump on the ground, however, changes the walk. Reflexes kick in and adjust the movement patterns to keep the animal from falling. These momentary changes in the movement signals are reversible, or 'elastic', and the movement patterns return to their original configuration after the disturbance. But if the animal does not stop stumbling over many cycles of movement – despite active reflexes – then the movement patterns must be relearned and made 'plastic', i.e., irreversible. In the newborn animal, CPGs are initially not yet adjusted well enough and the animal stumbles around, both on even or uneven terrain. But the animal rapidly learns how its CPGs and reflexes control leg muscles and tendons.
The same holds true for the Labrador-sized robot-dog named "Morti". Even more, the robot optimizes its movement patterns faster than an animal, in about one hour. Morti’s CPG is simulated on a small and lightweight computer that controls the motion of the robot’s legs. This virtual spinal cord is placed on the quadruped robot’s back where the head would be. During the hour it takes for the robot to walk smoothly, sensor data from the robot’s feet are continuously compared with the expected touch-down predicted by the robot’s CPG. If the robot stumbles, the learning algorithm changes how far the legs swing back and forth, how fast the legs swing, and how long a leg is on the ground. The adjusted motion also affects how well the robot can utilize its compliant leg mechanics. During the learning process, the CPG sends adapted motor signals so that the robot henceforth stumbles less and optimizes its walking. In this framework, the virtual spinal cord has no explicit knowledge about the robot’s leg design, its motors and springs. Knowing nothing about the physics of the machine, it lacks a robot ‘model’.



Comments