

 However in this respect, he didn’t get them quite to perform. It seems natural that, just like in the (2-dimensional) Argand diagram, i, along with jand k, all being square roots of –1, should correspond to a 90° rotation, but they don’t. So here we go tomb raiding again, this time to find Benjamin Olinde Rodrigues (1795 – 1851), a French socialist banker who also happened to be a very capable mathematician. In 1840 he published the method of computing the product of two successive rotations in three dimensions. The trick is, that the formula involves the half-angles, both of the two component rotations and their combined result. His method and quaternion multiplication map onto each other perfectly. But he and Hamilton moved in completely different worlds, and they never met.
If we take a globe and turn it half way around any axis we get what is called a binary rotation; simply repeat this once and we’re back where we’re started. But because of Rodrigues’s half angle (which Hamilton missed!) in quaternions i, j, or k must represent a binary rotation. Do this twice, your globe in real space is back where is started but you have multiplied your quaternion by –1. In fact, any quaternion and its negative represent the same rotation; this can be visualized by saying that rotating 30° clockwise round the north pole is the same as 30° anticlockwise round the south. Very quaint and Victorian, you might say, but they have exact parallels in the group theory which you must acquire if ever you want to get hold of the Standard Model. The unit quaternions map mathematically onto the group SU(2) which pops up frequently in contemporary physics (not only the standard model) while SO(3) describes rotations in our own three-dimensional world. SU(2) is said to be the double cover, which means that an element of SU(2) and its negative both correspond the same element of SO(3).
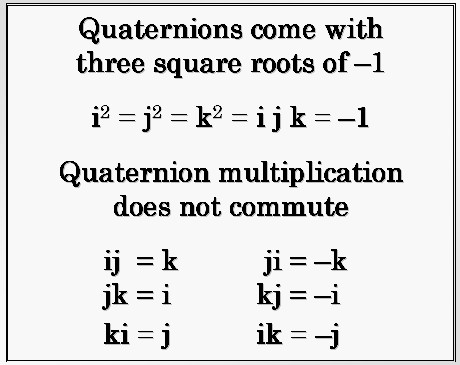
Even in their time, though, quaternions did open up a lot of new fields. They were the first algebraic objects discovered whose multiplication was not commutative. The same is true of matrices, introduced by Arthur Cayley in his famous Memoir of 1855. James Clerk Maxwell used them in his development of electromagnetic theory, though he did not use them in his exposition for general readership. “May one plough with an ox and an ass together?” he wrote, explaining why he would not mix them in with more traditional notation. Also, while the i, j, or k of quaternions do look like a vector (and were so called by Hamilton) they do not perform mathematically exactly like the vectors we used today. After 1891, when Gibbs (of the Free Energy) and Heaviside (of the atmospheric layer) modified them to give us vectors as we know them, quaternions disappeared into the museum of Victorian antiquities, only to be dusted off occasionally as a mathematical curiosity.
Two for one again! This brings us to spinors. In 1913 the French mathematician Elie Cartan (1869 – 1951) introduced these, minus the name. In our real space, we can compute the length of a vector by a three-dimensional version of the Pythagorean theorem. In a space with three complex dimensions, one does the same, but there arises the possibility that the sum of the three squares is zero! These are called isotropic vectors. Cartan showed that these can be represented by paired complex numbers. If one takes the complex vector and rotates it, by multiplying by eiθ (as one does), when θ reaches 2π or 360° we are back where we started. But the pair of complex numbers has now changed sign! This is because, in relation to the vector they were derived from, they are “square-rooty” things. One has to keep on rotatin’ until the vector has gone round 720°C before the pair assumes it original value.
In 1925 the spinning electron concept was put forward to explain the splitting of spectral lines in a magnetic field (the Zeeman effect), and Wolfgang Pauli quickly seized on these mathematical objects to mathematically describe the phenomenon. In 1931 Paul Ehrenfest introduced the name spinor to describe them. But we are reaching a turning point in the relationship between physics and mathematics. In 1928 Paul Dirac brought special relativity into the equation (literally!), thereby predicting the positron which was discovered in 1932. Thenceforth, in particle physics especially, we have increasingly been living in a world where mathematics drives the experiments, rather than the other way round.
Afterthought: The second chapter of “Icons and Symmetries” by Simon L. Altmann not only tells the quaternion story in detail, but gives us an interesting insight into spinors. Two of the simple 2-spinors I have described here can give a tensor product which is an ordinary 3-dimensional vector. This suggests to me that such “spinor space” might be even more fundamental than that which we experience (what would Kant have made of that?) But I wonder, would an intelligent mantis shrimp, with two independently rotatable eyes capable of analyzing polarized light, be able to visualize such space?
However in this respect, he didn’t get them quite to perform. It seems natural that, just like in the (2-dimensional) Argand diagram, i, along with jand k, all being square roots of –1, should correspond to a 90° rotation, but they don’t. So here we go tomb raiding again, this time to find Benjamin Olinde Rodrigues (1795 – 1851), a French socialist banker who also happened to be a very capable mathematician. In 1840 he published the method of computing the product of two successive rotations in three dimensions. The trick is, that the formula involves the half-angles, both of the two component rotations and their combined result. His method and quaternion multiplication map onto each other perfectly. But he and Hamilton moved in completely different worlds, and they never met.
If we take a globe and turn it half way around any axis we get what is called a binary rotation; simply repeat this once and we’re back where we’re started. But because of Rodrigues’s half angle (which Hamilton missed!) in quaternions i, j, or k must represent a binary rotation. Do this twice, your globe in real space is back where is started but you have multiplied your quaternion by –1. In fact, any quaternion and its negative represent the same rotation; this can be visualized by saying that rotating 30° clockwise round the north pole is the same as 30° anticlockwise round the south. Very quaint and Victorian, you might say, but they have exact parallels in the group theory which you must acquire if ever you want to get hold of the Standard Model. The unit quaternions map mathematically onto the group SU(2) which pops up frequently in contemporary physics (not only the standard model) while SO(3) describes rotations in our own three-dimensional world. SU(2) is said to be the double cover, which means that an element of SU(2) and its negative both correspond the same element of SO(3).
Even in their time, though, quaternions did open up a lot of new fields. They were the first algebraic objects discovered whose multiplication was not commutative. The same is true of matrices, introduced by Arthur Cayley in his famous Memoir of 1855. James Clerk Maxwell used them in his development of electromagnetic theory, though he did not use them in his exposition for general readership. “May one plough with an ox and an ass together?” he wrote, explaining why he would not mix them in with more traditional notation. Also, while the i, j, or k of quaternions do look like a vector (and were so called by Hamilton) they do not perform mathematically exactly like the vectors we used today. After 1891, when Gibbs (of the Free Energy) and Heaviside (of the atmospheric layer) modified them to give us vectors as we know them, quaternions disappeared into the museum of Victorian antiquities, only to be dusted off occasionally as a mathematical curiosity.
Two for one again! This brings us to spinors. In 1913 the French mathematician Elie Cartan (1869 – 1951) introduced these, minus the name. In our real space, we can compute the length of a vector by a three-dimensional version of the Pythagorean theorem. In a space with three complex dimensions, one does the same, but there arises the possibility that the sum of the three squares is zero! These are called isotropic vectors. Cartan showed that these can be represented by paired complex numbers. If one takes the complex vector and rotates it, by multiplying by eiθ (as one does), when θ reaches 2π or 360° we are back where we started. But the pair of complex numbers has now changed sign! This is because, in relation to the vector they were derived from, they are “square-rooty” things. One has to keep on rotatin’ until the vector has gone round 720°C before the pair assumes it original value.
In 1925 the spinning electron concept was put forward to explain the splitting of spectral lines in a magnetic field (the Zeeman effect), and Wolfgang Pauli quickly seized on these mathematical objects to mathematically describe the phenomenon. In 1931 Paul Ehrenfest introduced the name spinor to describe them. But we are reaching a turning point in the relationship between physics and mathematics. In 1928 Paul Dirac brought special relativity into the equation (literally!), thereby predicting the positron which was discovered in 1932. Thenceforth, in particle physics especially, we have increasingly been living in a world where mathematics drives the experiments, rather than the other way round.
Afterthought: The second chapter of “Icons and Symmetries” by Simon L. Altmann not only tells the quaternion story in detail, but gives us an interesting insight into spinors. Two of the simple 2-spinors I have described here can give a tensor product which is an ordinary 3-dimensional vector. This suggests to me that such “spinor space” might be even more fundamental than that which we experience (what would Kant have made of that?) But I wonder, would an intelligent mantis shrimp, with two independently rotatable eyes capable of analyzing polarized light, be able to visualize such space? 
Mathematical Tomb Raiding ... Or Symmetry And The Standard Model (2)
Have you ever been puzzled by a statement like this: “Rotating a spin-1/2 particle by 360° does not bring it back to the same quantum state, but to the state with the opposite quantum phase; this is detectable, in principle, with interference experiments. To return the particle to its exact original state, one needs a 720° rotation.” (Wikipedia). Last week I zoomed back to 1820 and introduced Ørsted and his famous experiment, and left you with a promise of going mathematical tomb raiding.
Tomb Raider was first released in 1996 for the Sega Saturn, and other platforms followed. The lore has it that this was the first mass market video game to be programmed using quaternions. Prior to that, rotations had been represented by Euler Angles or similar. Imagine you are flying an aeroplane. You are going in direction A, heading up or down at angle B, and your wings are tilted at angle C. Euler’s achievement in introducing these to the worlds of mechanics, astronomy, etc., in the mid-18th century was a landmark in itself. But they do come with mathematical problems when you are flying and tumbling at the speed of Lara Croft, one of which is that in certain orientations you can get a bad case of gimbal lock. Step in quaternions: the mathematical tomb raider who brought these to the worlds of video gaming and flight simulation appears to be Ken Shoemake, of the University of Pennsylvania, with a seminal paper in the journal Computer Graphics, 1985. But whom exactly did he, so to speak, “excavate”?
In my chemistry undergraduate course (mid 60s) I encountered the mysterious “Hamiltonian” which was brought in, apparently ex machina, in order to explain atomic and molecular orbitals. Physics undergraduates will probably first meet it in connection with the Schrödinger wave equation. It is, however, named after William Rowan Hamilton (1805 – 1865) who first stated it in On a General Method in Dynamics in 1834. Also around that time, he was trying to extend complex numbers, which he saw as ordered pairs of number and which are represented in the 2-dimensional Argand diagram, to triplets which could be used to represent 3-dimensional space. For nine years he struggled with triplets, but couldn’t get them to work. But in 1843 he was walking across Brougham Bridge in Dublin, when it came to him in a flash that an ordered tetrad of numbers would work. The very same day, he realized that they could be used to represent rotations.
However in this respect, he didn’t get them quite to perform. It seems natural that, just like in the (2-dimensional) Argand diagram, i, along with jand k, all being square roots of –1, should correspond to a 90° rotation, but they don’t. So here we go tomb raiding again, this time to find Benjamin Olinde Rodrigues (1795 – 1851), a French socialist banker who also happened to be a very capable mathematician. In 1840 he published the method of computing the product of two successive rotations in three dimensions. The trick is, that the formula involves the half-angles, both of the two component rotations and their combined result. His method and quaternion multiplication map onto each other perfectly. But he and Hamilton moved in completely different worlds, and they never met.
If we take a globe and turn it half way around any axis we get what is called a binary rotation; simply repeat this once and we’re back where we’re started. But because of Rodrigues’s half angle (which Hamilton missed!) in quaternions i, j, or k must represent a binary rotation. Do this twice, your globe in real space is back where is started but you have multiplied your quaternion by –1. In fact, any quaternion and its negative represent the same rotation; this can be visualized by saying that rotating 30° clockwise round the north pole is the same as 30° anticlockwise round the south. Very quaint and Victorian, you might say, but they have exact parallels in the group theory which you must acquire if ever you want to get hold of the Standard Model. The unit quaternions map mathematically onto the group SU(2) which pops up frequently in contemporary physics (not only the standard model) while SO(3) describes rotations in our own three-dimensional world. SU(2) is said to be the double cover, which means that an element of SU(2) and its negative both correspond the same element of SO(3).
Even in their time, though, quaternions did open up a lot of new fields. They were the first algebraic objects discovered whose multiplication was not commutative. The same is true of matrices, introduced by Arthur Cayley in his famous Memoir of 1855. James Clerk Maxwell used them in his development of electromagnetic theory, though he did not use them in his exposition for general readership. “May one plough with an ox and an ass together?” he wrote, explaining why he would not mix them in with more traditional notation. Also, while the i, j, or k of quaternions do look like a vector (and were so called by Hamilton) they do not perform mathematically exactly like the vectors we used today. After 1891, when Gibbs (of the Free Energy) and Heaviside (of the atmospheric layer) modified them to give us vectors as we know them, quaternions disappeared into the museum of Victorian antiquities, only to be dusted off occasionally as a mathematical curiosity.
Two for one again! This brings us to spinors. In 1913 the French mathematician Elie Cartan (1869 – 1951) introduced these, minus the name. In our real space, we can compute the length of a vector by a three-dimensional version of the Pythagorean theorem. In a space with three complex dimensions, one does the same, but there arises the possibility that the sum of the three squares is zero! These are called isotropic vectors. Cartan showed that these can be represented by paired complex numbers. If one takes the complex vector and rotates it, by multiplying by eiθ (as one does), when θ reaches 2π or 360° we are back where we started. But the pair of complex numbers has now changed sign! This is because, in relation to the vector they were derived from, they are “square-rooty” things. One has to keep on rotatin’ until the vector has gone round 720°C before the pair assumes it original value.
In 1925 the spinning electron concept was put forward to explain the splitting of spectral lines in a magnetic field (the Zeeman effect), and Wolfgang Pauli quickly seized on these mathematical objects to mathematically describe the phenomenon. In 1931 Paul Ehrenfest introduced the name spinor to describe them. But we are reaching a turning point in the relationship between physics and mathematics. In 1928 Paul Dirac brought special relativity into the equation (literally!), thereby predicting the positron which was discovered in 1932. Thenceforth, in particle physics especially, we have increasingly been living in a world where mathematics drives the experiments, rather than the other way round.
Afterthought: The second chapter of “Icons and Symmetries” by Simon L. Altmann not only tells the quaternion story in detail, but gives us an interesting insight into spinors. Two of the simple 2-spinors I have described here can give a tensor product which is an ordinary 3-dimensional vector. This suggests to me that such “spinor space” might be even more fundamental than that which we experience (what would Kant have made of that?) But I wonder, would an intelligent mantis shrimp, with two independently rotatable eyes capable of analyzing polarized light, be able to visualize such space?
However in this respect, he didn’t get them quite to perform. It seems natural that, just like in the (2-dimensional) Argand diagram, i, along with jand k, all being square roots of –1, should correspond to a 90° rotation, but they don’t. So here we go tomb raiding again, this time to find Benjamin Olinde Rodrigues (1795 – 1851), a French socialist banker who also happened to be a very capable mathematician. In 1840 he published the method of computing the product of two successive rotations in three dimensions. The trick is, that the formula involves the half-angles, both of the two component rotations and their combined result. His method and quaternion multiplication map onto each other perfectly. But he and Hamilton moved in completely different worlds, and they never met.
If we take a globe and turn it half way around any axis we get what is called a binary rotation; simply repeat this once and we’re back where we’re started. But because of Rodrigues’s half angle (which Hamilton missed!) in quaternions i, j, or k must represent a binary rotation. Do this twice, your globe in real space is back where is started but you have multiplied your quaternion by –1. In fact, any quaternion and its negative represent the same rotation; this can be visualized by saying that rotating 30° clockwise round the north pole is the same as 30° anticlockwise round the south. Very quaint and Victorian, you might say, but they have exact parallels in the group theory which you must acquire if ever you want to get hold of the Standard Model. The unit quaternions map mathematically onto the group SU(2) which pops up frequently in contemporary physics (not only the standard model) while SO(3) describes rotations in our own three-dimensional world. SU(2) is said to be the double cover, which means that an element of SU(2) and its negative both correspond the same element of SO(3).
Even in their time, though, quaternions did open up a lot of new fields. They were the first algebraic objects discovered whose multiplication was not commutative. The same is true of matrices, introduced by Arthur Cayley in his famous Memoir of 1855. James Clerk Maxwell used them in his development of electromagnetic theory, though he did not use them in his exposition for general readership. “May one plough with an ox and an ass together?” he wrote, explaining why he would not mix them in with more traditional notation. Also, while the i, j, or k of quaternions do look like a vector (and were so called by Hamilton) they do not perform mathematically exactly like the vectors we used today. After 1891, when Gibbs (of the Free Energy) and Heaviside (of the atmospheric layer) modified them to give us vectors as we know them, quaternions disappeared into the museum of Victorian antiquities, only to be dusted off occasionally as a mathematical curiosity.
Two for one again! This brings us to spinors. In 1913 the French mathematician Elie Cartan (1869 – 1951) introduced these, minus the name. In our real space, we can compute the length of a vector by a three-dimensional version of the Pythagorean theorem. In a space with three complex dimensions, one does the same, but there arises the possibility that the sum of the three squares is zero! These are called isotropic vectors. Cartan showed that these can be represented by paired complex numbers. If one takes the complex vector and rotates it, by multiplying by eiθ (as one does), when θ reaches 2π or 360° we are back where we started. But the pair of complex numbers has now changed sign! This is because, in relation to the vector they were derived from, they are “square-rooty” things. One has to keep on rotatin’ until the vector has gone round 720°C before the pair assumes it original value.
In 1925 the spinning electron concept was put forward to explain the splitting of spectral lines in a magnetic field (the Zeeman effect), and Wolfgang Pauli quickly seized on these mathematical objects to mathematically describe the phenomenon. In 1931 Paul Ehrenfest introduced the name spinor to describe them. But we are reaching a turning point in the relationship between physics and mathematics. In 1928 Paul Dirac brought special relativity into the equation (literally!), thereby predicting the positron which was discovered in 1932. Thenceforth, in particle physics especially, we have increasingly been living in a world where mathematics drives the experiments, rather than the other way round.
Afterthought: The second chapter of “Icons and Symmetries” by Simon L. Altmann not only tells the quaternion story in detail, but gives us an interesting insight into spinors. Two of the simple 2-spinors I have described here can give a tensor product which is an ordinary 3-dimensional vector. This suggests to me that such “spinor space” might be even more fundamental than that which we experience (what would Kant have made of that?) But I wonder, would an intelligent mantis shrimp, with two independently rotatable eyes capable of analyzing polarized light, be able to visualize such space? Related articles
- Mind-Bending Science In Thomas Pynchon's Mind-Bending Novel Against The Day: Part II- The Quaternion Wars
- A Privileged Space Direction? Spinorial Space-time, WMAP, Planck (II)
- Symmetry And The Standard Model (1)
- Scalars, Vectors, and Quaternion [Scalars and Quaternion Vectors]: Definitions (1 of 2)
- Snarky Puzzle Answers 2




Comments