


The image of robotics in popular culture is classic science fiction; cogwheels, pistons and levers with perhaps a layer of rubberized skin: miniaturized robots of the future will be "soft".
"If I think of the robots of tomorrow, what comes to mind are the tentacles of an octopus or the trunk of an elephant rather than the mechanical arm of a crane or the inner workings of a watch. And if I think of micro-robots then I think of unicellular organisms moving in water. The robots of the future will be increasingly like biological organisms," explains Antonio De Simone of
International School of Advanced Studies (SISSA).
De Simone and his team at SISSA have been studying the movement of euglenids, unicellular aquatic animals, for several years. One of the aims of De Simone's research – which has recently been awarded a European Research Council Advanced Grant of 1,300,000 euro – is to transfer the knowledge acquired in euglenids to micro-robotics, a field that represents a promising challenge for the future. Micro-robots may in fact carry out a number of important functions, for example for human health, by delivering drugs directly to where they are needed, re-opening occluded blood vessels, or helping to close wounds, to name just a few.
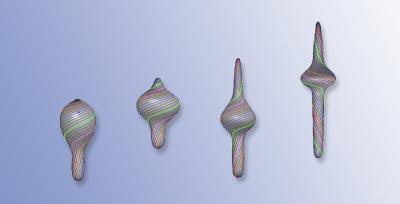
A simulation of euglenid movement. Credit: SISSA
To do this, these tiny robots will have to be able to move around efficiently. "Imagine trying to miniaturize a device made up of levers and cogwheels: you can't go below a certain minimal size. Instead, by mimicking biological systems we can go all the way down to cell size, and this is exactly the direction research is taking. We, in particular, are working on movement and studying how certain unicellular organisms with highly efficient locomotion move".
In their study, De Simone and Arroyo simulated euglenid species with different shapes and locomotion methods, based chiefly on cell body deformation and swelling, to describe in detail the mechanics and characteristics of the movement obtained.
"Our work not only helps to understand the movement mechanism of these unicellular organisms, but it provides a knowledge base to plan the locomotion system of future micro-robots".
n the Journal of the Mechanics and Physics of Solids.
Source: International School of Advanced Studies (SISSA)



Comments