


Researchers at Saarland University together with associates in Bologna and Naples have developed a robotic hand that can accomplish both tasks and the actuator is barely larger than a human arm. They use a novel string actuator, making use of small electric motors to twist strings, making the new robotic hand suitable as a helper around the house or in catastrophic scenarios.
The robotic hand was recently presented during a meeting at the Forschungszentrum Informatik in Karlsruhe.
"We wanted to impart our robotic hand with a broad spectrum of human traits. Its artificial muscles should be able to deliver enormous forces by simple and compact means," said Chris May, scientist at Saarland University's Laboratory of Actuation Technology.
"When robots help around the house or should save people from a burning building, they need to have hands which can grasp with strength but at the same time gently," said Hartmut Janocha, Professor of Process Automation at Saarland University. The challenge lies in trying to make the necessary technology fit within the robotic arm such that it does not differ significantly from a human arm in terms of size and form. "We came up with a simple, yet extremely effective idea: using strings that are twisted by small, high-speed motors, we are able to exert high tensile forces within a compact space," explained May, a mechatronic researcher. The sensorized and controlled robotic hand is able to touch diverse objects, to grasp and lift them and place them gently in a new position. Chris May demonstrated this in Karlsruhe with a delicate Easter egg and a heavy glass bottle.
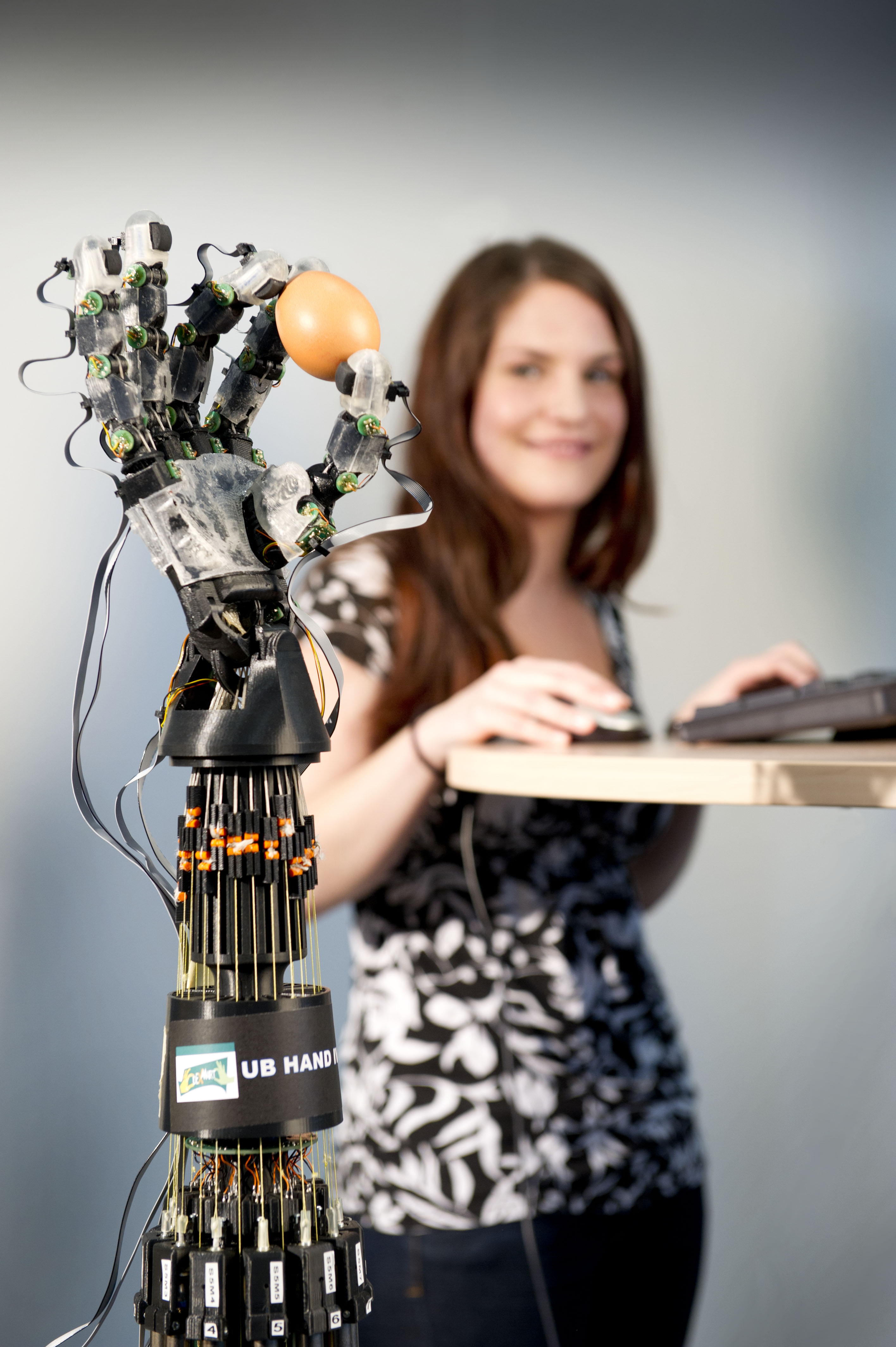
Photo: Markus Breig
Extremely strong polymer strings enable the Saarbrücken researchers to lift a five kilogram load by 30 mm within a split second, making use of a small electric motor and a 20 cm long string. "Each robotic finger, which like a human finger is comprised of three segments, can be controlled precisely by means of the individual tendons," May said as a way to describe the miniature actuator. The mini electric motors run at high speed and a small torque on the order of five Newton-millimetres. "The capability of the robotic hand is so near to that of humans that the vision of robots as personal assistants in the household, in the operating room as well as in industrial settings is becoming ever more realistic. We presume that the combination of small electric motors with twisted string is interesting for other applications as well."


Comments