


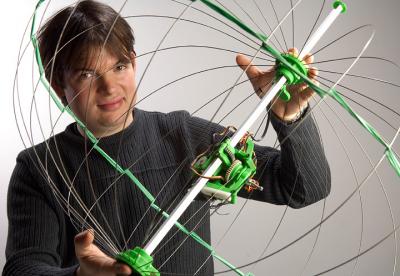
Rhodri Armour designed Jollbot as part of his Ph.D. thesis. Photo Credit: Nic Delves-Broughton, University of Bath)
One of the major challenges that face robots designed for space exploration is being able to move over rough terrain. Robots with legs are generally very complex, expensive to build and control, and encounter problems if they fall over. Wheels are a simpler solution to this, but are limited by the size of obstacles they can overcome.
To solve the problem, Rhodri and colleagues in the University's Centre for Biomimetic&Natural Technologies have been looking to nature for inspiration - designing a robot that jumps obstacles in its path like an insect.
The 'Jollbot' is shaped like a spherical cage which can roll in any direction, giving it the maneuverability of wheels without the problem of overturning or getting stuck in potholes. The robot is also flexible and small, weighing less than a kilogram, meaning it's not damaged when landing after jumping and is therefore less expensive than conventional exploration robots.
Armour explained, "Others in the past have made robots that jump and robots that roll; but we've made the first robot that can do both.In nature there are two main types of jumping: hopping, like a kangaroo, which uses its fine control and direct muscle action to propel it along; and 'pause and leap', such as in a grasshopper, which stores muscle energy in spring-like elements and rapidly releases it to make the jump."
Armour took measurements using a high speed camera to analyze how the robot jumped and to predict how it might behave in a low-gravity environment, such as in space.
He added, "Future prototypes could include a stretchy skin covered in solar cells on the outside of the robot, so it could power itself, and robotic control sensors to enable it to sense its environment."
The components of the robot were made by rapid prototyping technology, similar to that used by the RepRap machine pioneered by the University, which builds parts by "printing" layers of plastic on top of each other to produce a 3D object.



Comments